
The wireless remote controller is the most improtant part of the project. I spent a lot of time for developing of the mechanical and the electronic parts.
My goal was to get a remote control system and also a loging ride data store all electric parameters during the ride.
To get better performace of communication in the water the remote controller sends the trigger level every 100ms in dual band to the receiver using different module and protocols: ESP-NOW and LoRa coded for the target board
Actually is possible to use the easy circuit version of the transmitter and receiver witout LoRa module. The firmware is the same and auto adapt the communication at 2.4GHz only
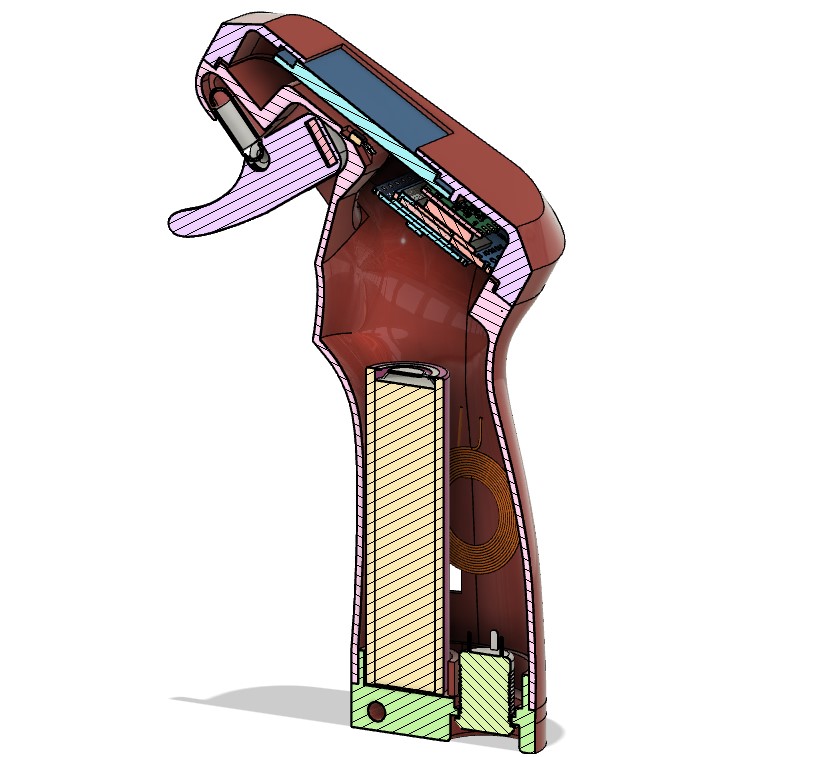
- Ergonomic case in 4 parts by 3d printing
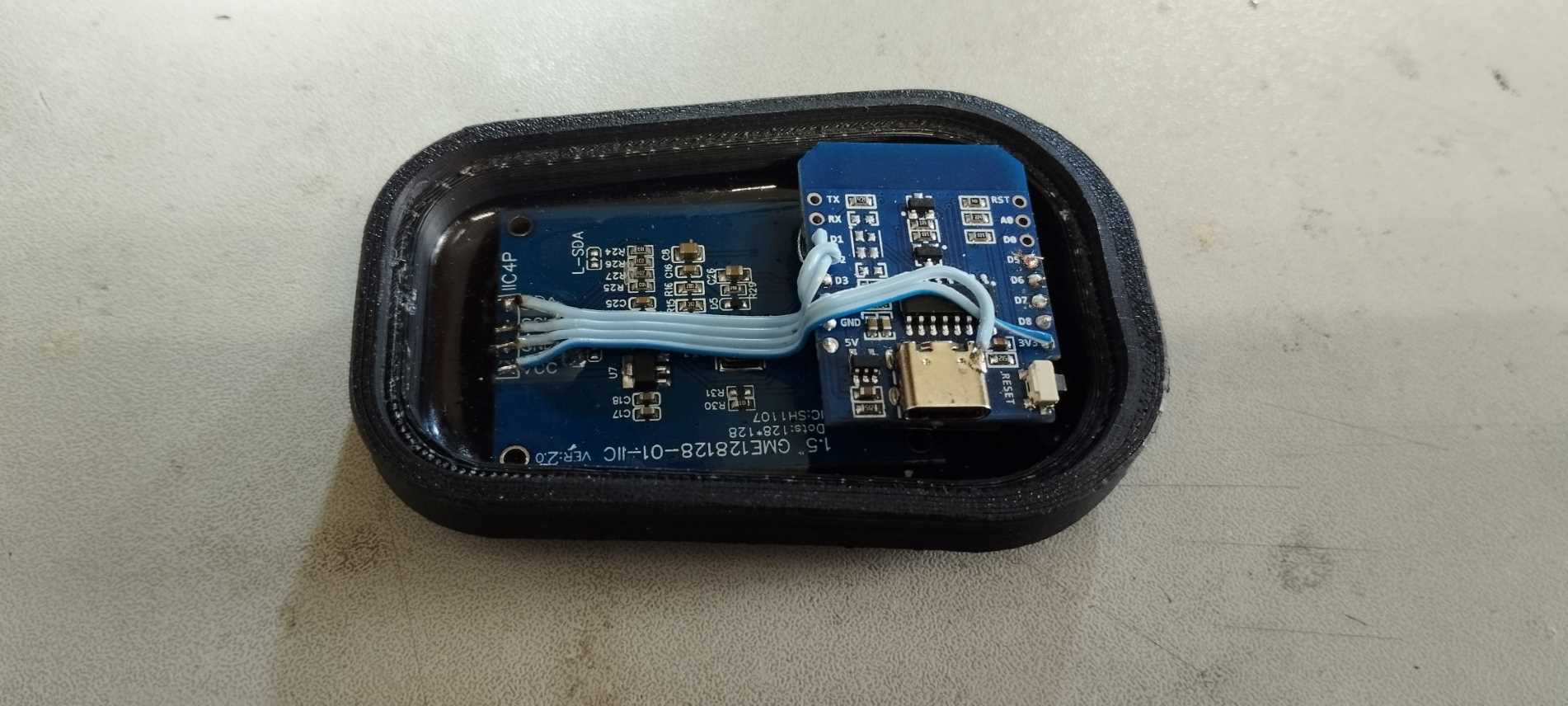
- Display OLed 1.5 inch
- Wireless communication at 2.4GHz and 433MHz (dual Band)
- Firmware upgradable by server (WiFi)
- Recording VESC datas (last 10 ride) in the internal memory of the receiver
- WiFi hot spot of the receiver to analize data and setting
- Vibration alarm for battery low
- Plastic bearings on trigger for precision control
- Integrated battery 18650 2200mAh (10 hours)
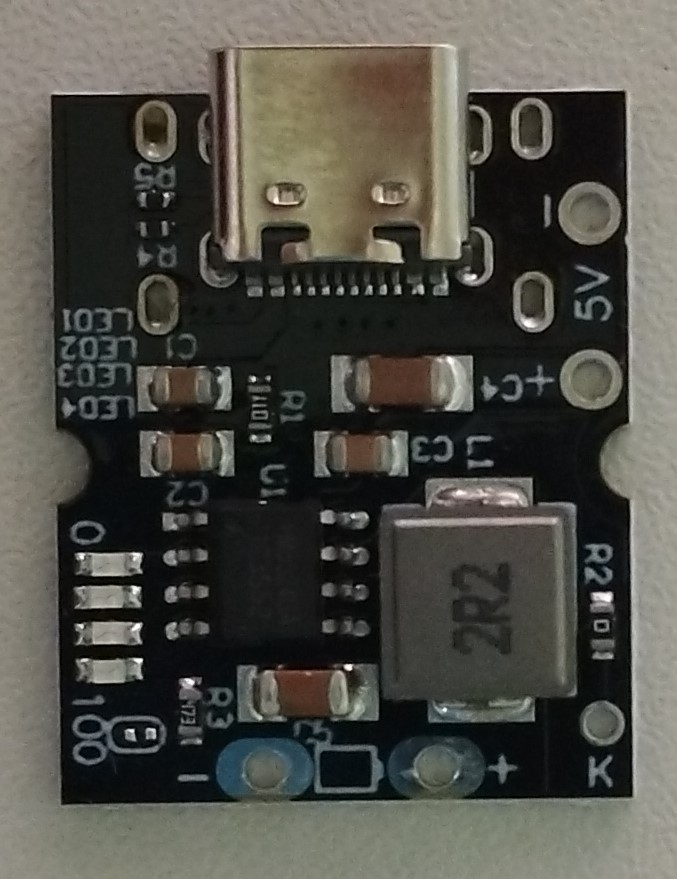
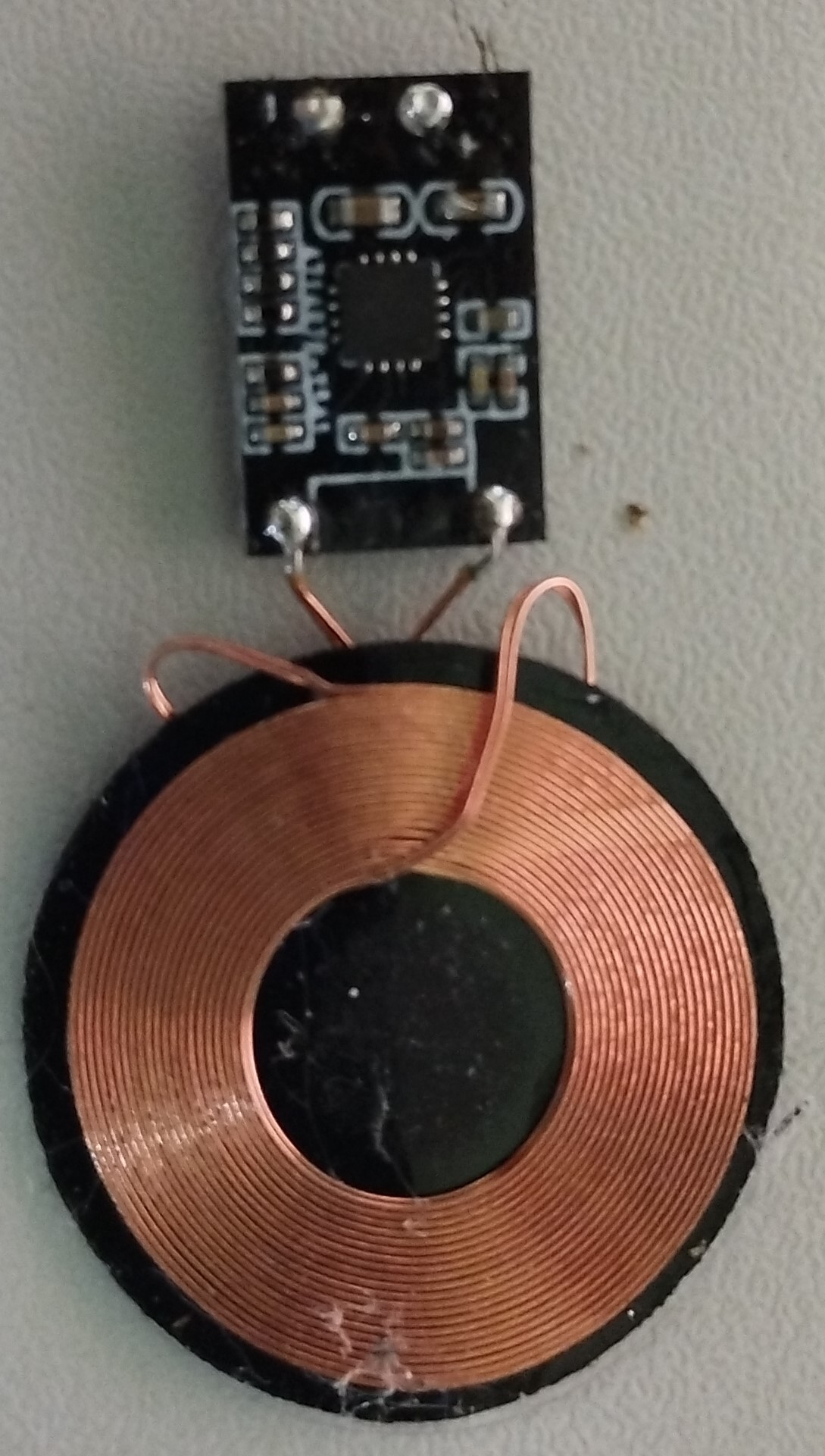
- Wireless charging system
- - Trigger's spring interchangeable
Case of transmitter (3D Print STL parts)
STL files (last version)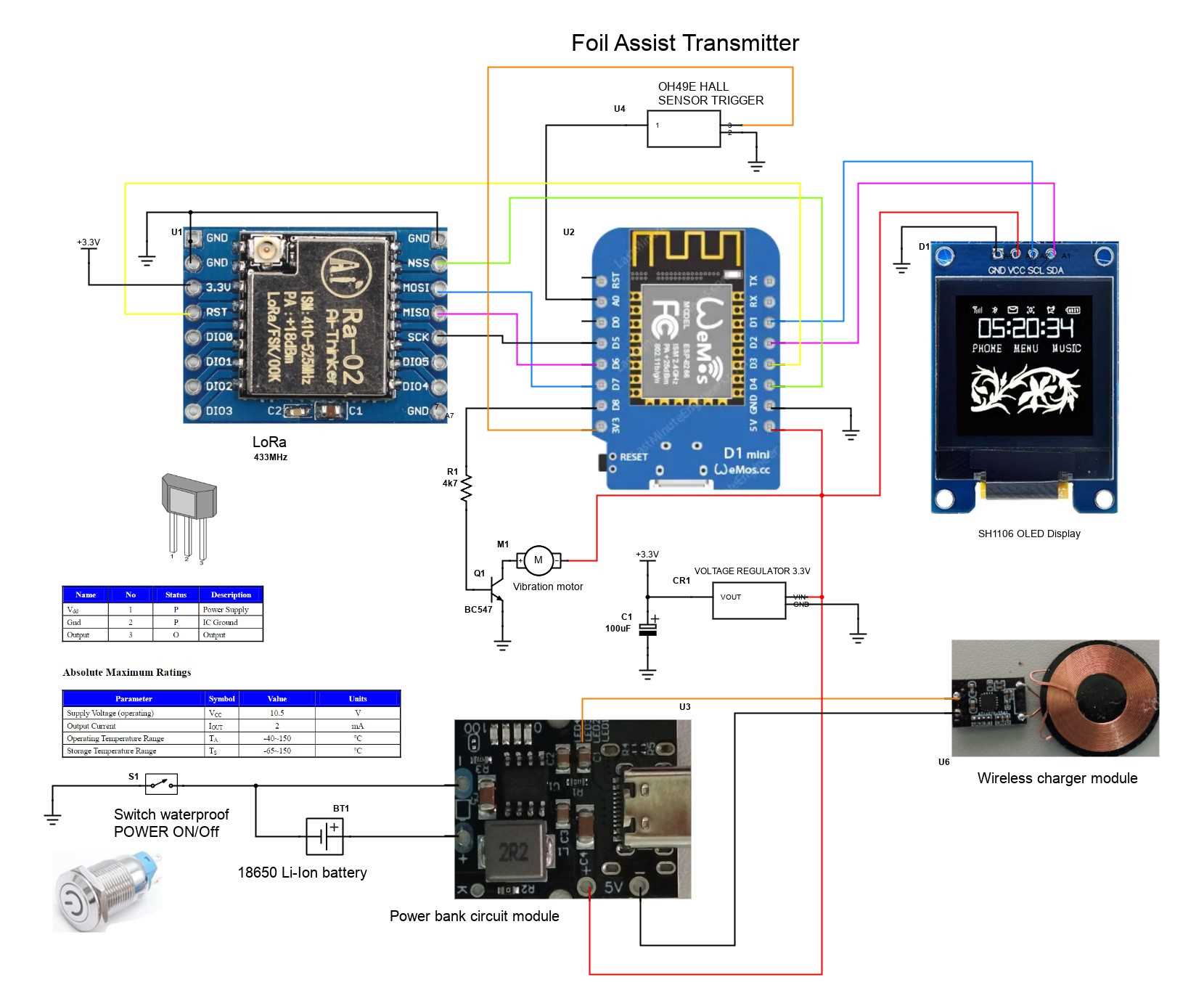
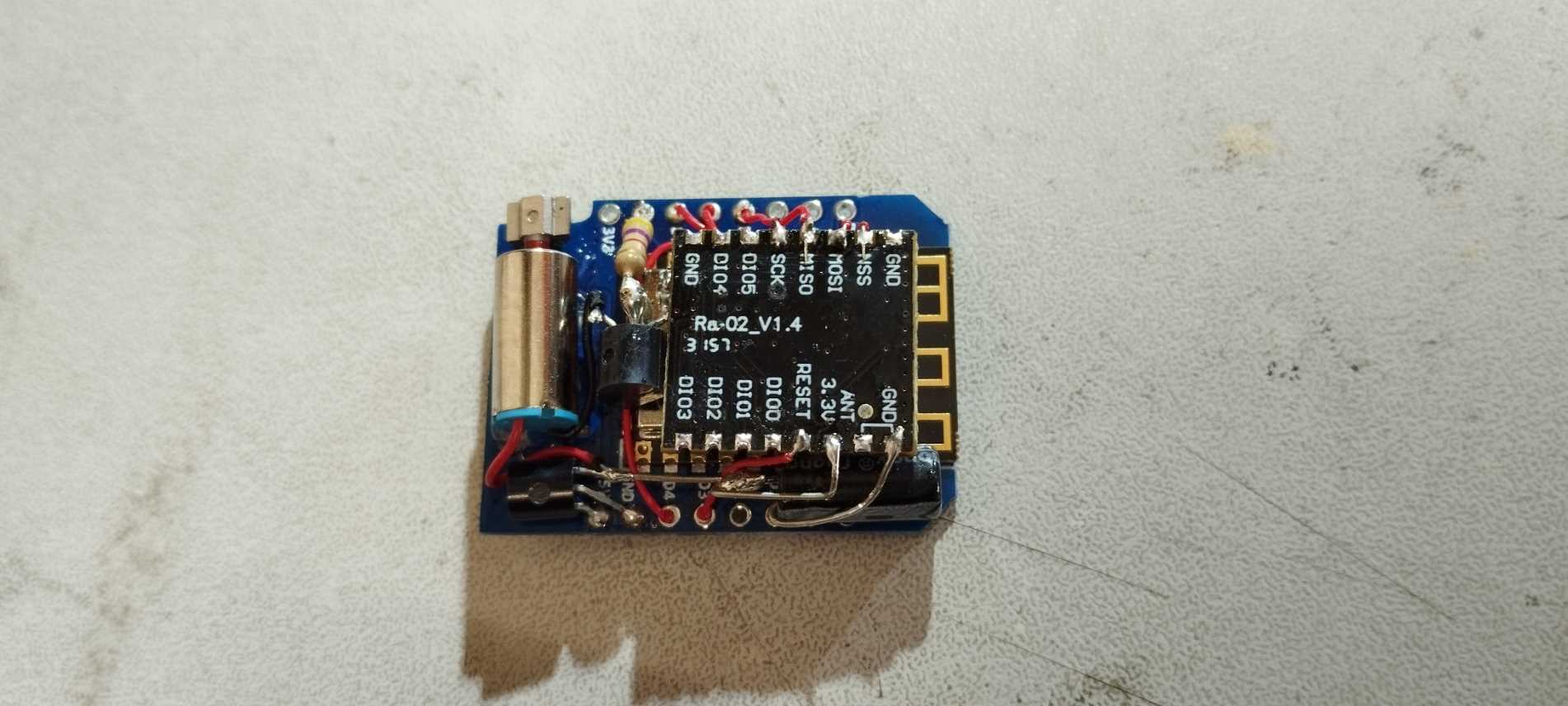
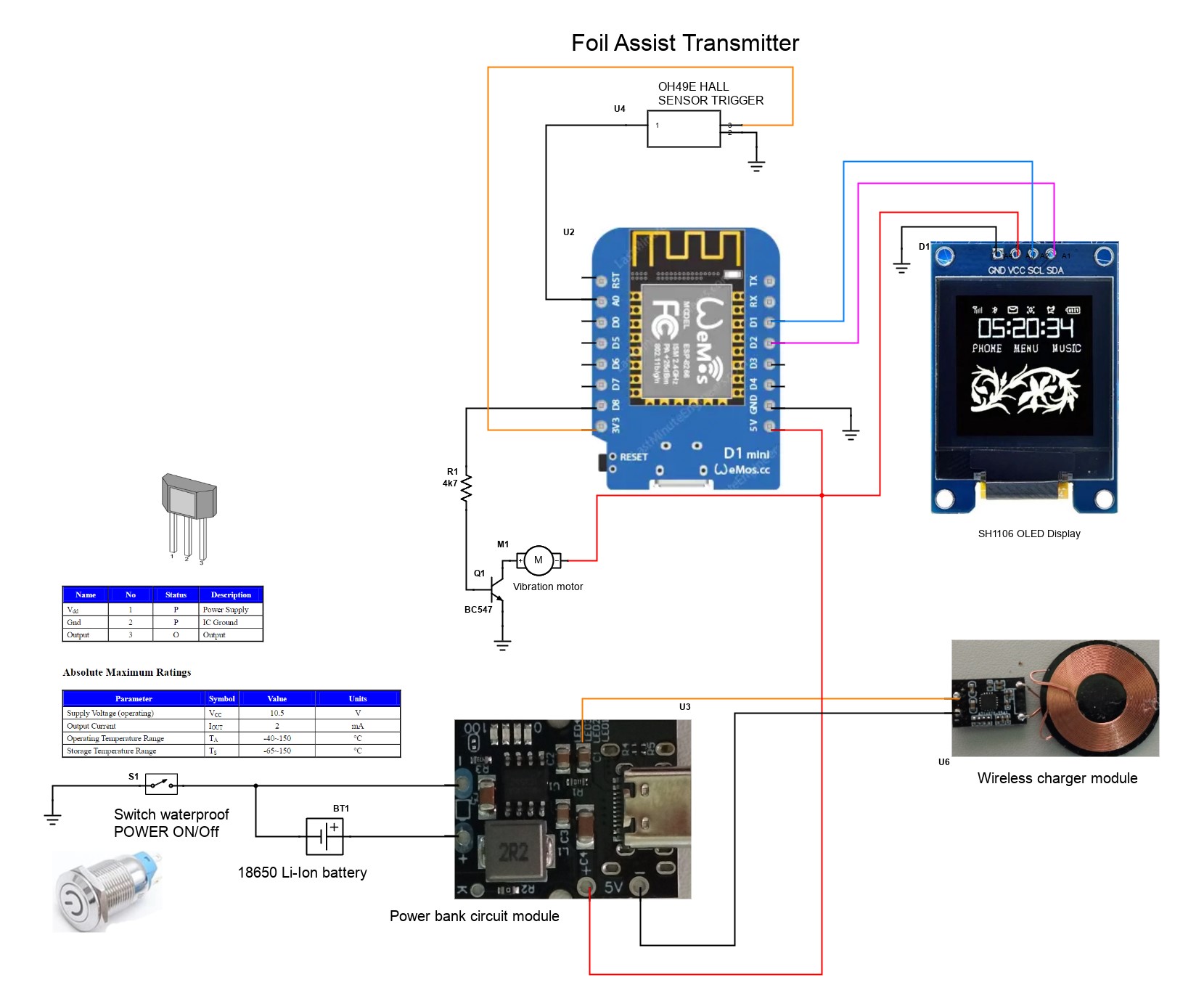
The remote TX controller is based on ESP8266 D1 Mini and others commercial modules, oled display, LoRa module (optional), wireless charger and power bank conneted together.
Source code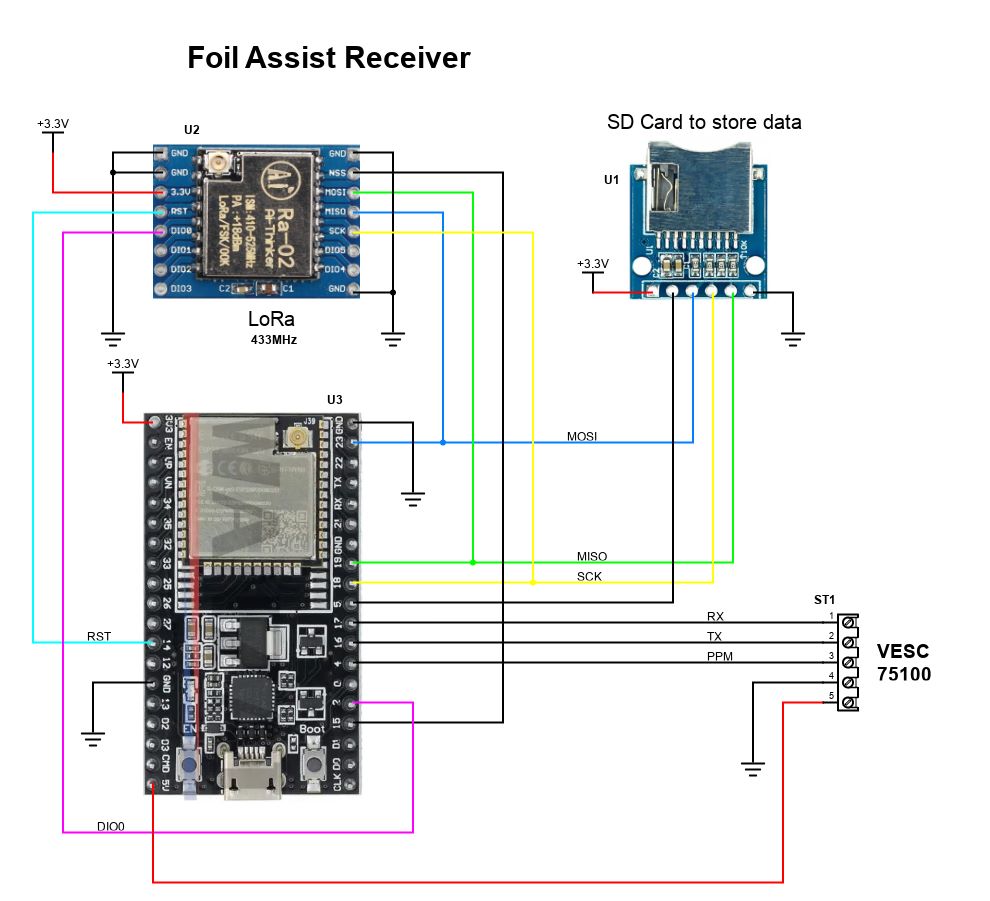
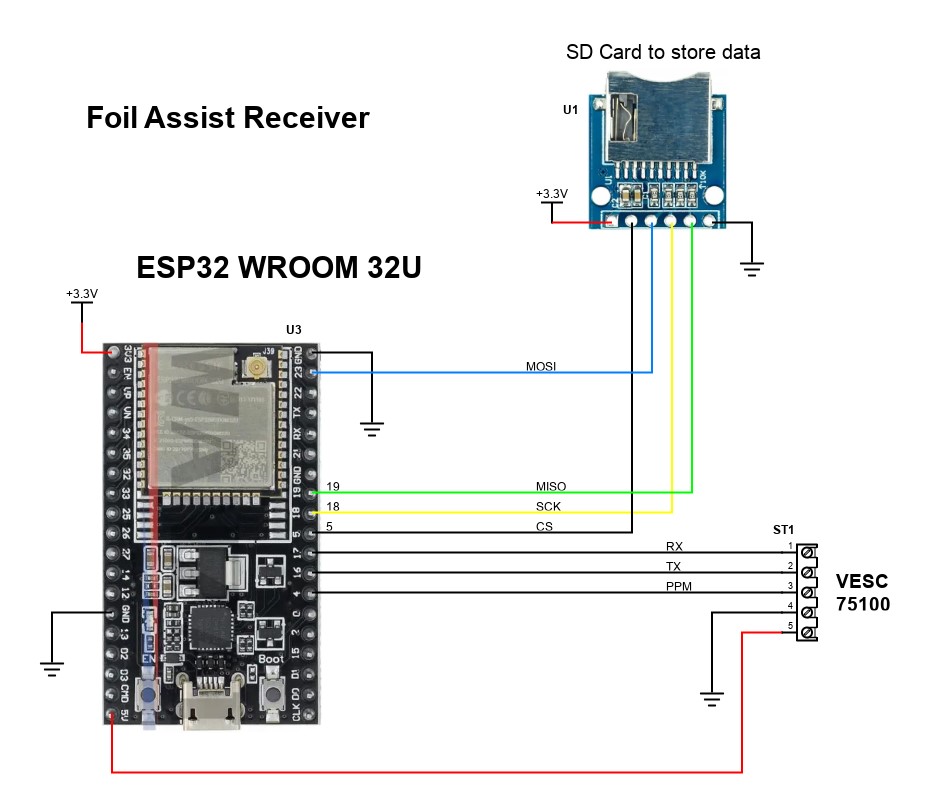
The remote RX receiver is based on ESP32 WROOM. The Lora module is optional in the receiver and transimetter. The firmware auto detect and use LoRa transmition if the module is connected to the ESP. The trigger value from hall sensor could be sent by the LoRa channel in parallel to the ESP-NOW channel. LoRa transmition at 433MHz improves the remote performance in the water. Communication with VESC via UART
Source code